Sergio
Díaz‑Ruiz
Universe photography

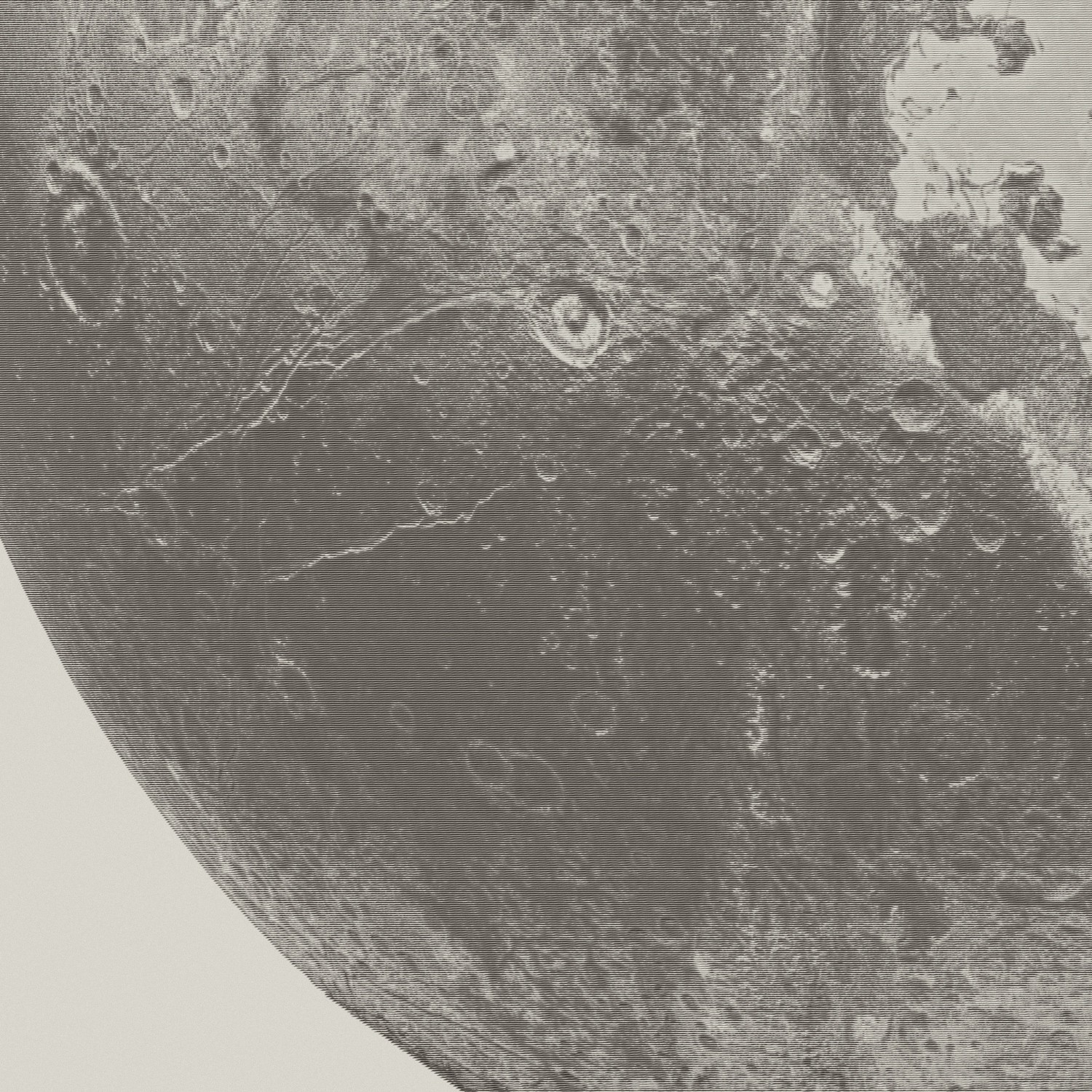
Cassinified Pluto by Sergio Díaz Ruiz @expanding_astro #APY15 (8/11) pic.twitter.com/U4bQPWBjnd
— Royal Museums Greenwich (@RMGreenwich) June 27, 2023
+Info & full credits: Royal Museums Greenwich
'Busy Star' entre las imágenes clasificadas para el concurso Astronomy Photographer of the Year 2022 @RMGreenwich, categoría Annie Maunder Prize for Image Innovation
— Sergio Díaz (@expanding_astro) July 21, 2022
Créditos: NOAA / NCEI SUVI Team / Sergio Díazhttps://t.co/HUnqRNHSnM pic.twitter.com/IE63A82eoG
+Info & full credits: Royal Museums Greenwich, National Geographic, BBC Sky at Night
 [Courtesy of Juanlu M.]")
MSc in Computer Engineering and MSc in Data Science. Full-time husband and father. By day, an IT Engineer for the Government of Andalucía, Spain. By night, an astronomer and astrophotographer, whenever possible.
I developed passion for astronomy since I watched Carl Sagan's Cosmos series as a kid. The astrophotographs of David Malin and Akira Fujii also captivated my imagination. I read every astronomy book that crossed my path, but didn't really experience the wonders of visual, naked-eye observation until my early adolescence when for the first time I could be under relatively dark skies, at least dark enough for a city boy. On my twenties I had access to a 8" telescope and began to use it at the rooftop of my home, downtown Seville city, in Spain.
After borrowing my father's old film camera for a few times, finally in 2002 I purchased my first digital camera for daytime photos and naturally I started to photograph some night landscapes and telescopic targets. That was the beginning of a long journey with many trips and interruptions, but eventually I managed to made my path. I'm a self-taught photographer, which means that almost all I learned, and still learn, came from others, some renowned, some anonymous, all more skillful than I am, so thank you sincerely.
Digital format enabled me to explore photography without the stress of wasting film. Naturally I evolved also in daytime photography, which I also love, as an expression for the delight of nature, architecture, and of course, people. I like to travel, usually with my loved family, and bring the camera with me wherever I go.
As an enthusiast on technology, I chose to study Electronics in secondary school and then made a career on Computer Engineering. I enjoy making photographic accessories by 3D-printing custom models and developing the electronics for them. More recently I reinvented myself as data scientist, something that naturally influenced my perspective about astrophotography.
I'm a member of the Astronomía Sevilla Association, the Andalusian Network of Astronomy (Red Andaluza de Astronomía, RAdA), the Federation of Astronomical Associations of Spain (Federación de Asociaciones Astronómicas de España, FAAE) and the Association against Light Pollution Cel Fosc.
Within FAAE, I'm a member of the Astronomical Computation Group (GCA, Grupo de Cálculo Astronómico), which is responsible for the publication of the Journal of Computational Astronomy and Astronomical Computation (JCAAC).
Since 2024 I'm also a Divulgador FAAE (certified outreach educator).
In this site I wanted to share with you some of my photographic work, hoping that it evokes you the same emotions that I experienced when I was there, releasing the shutter.
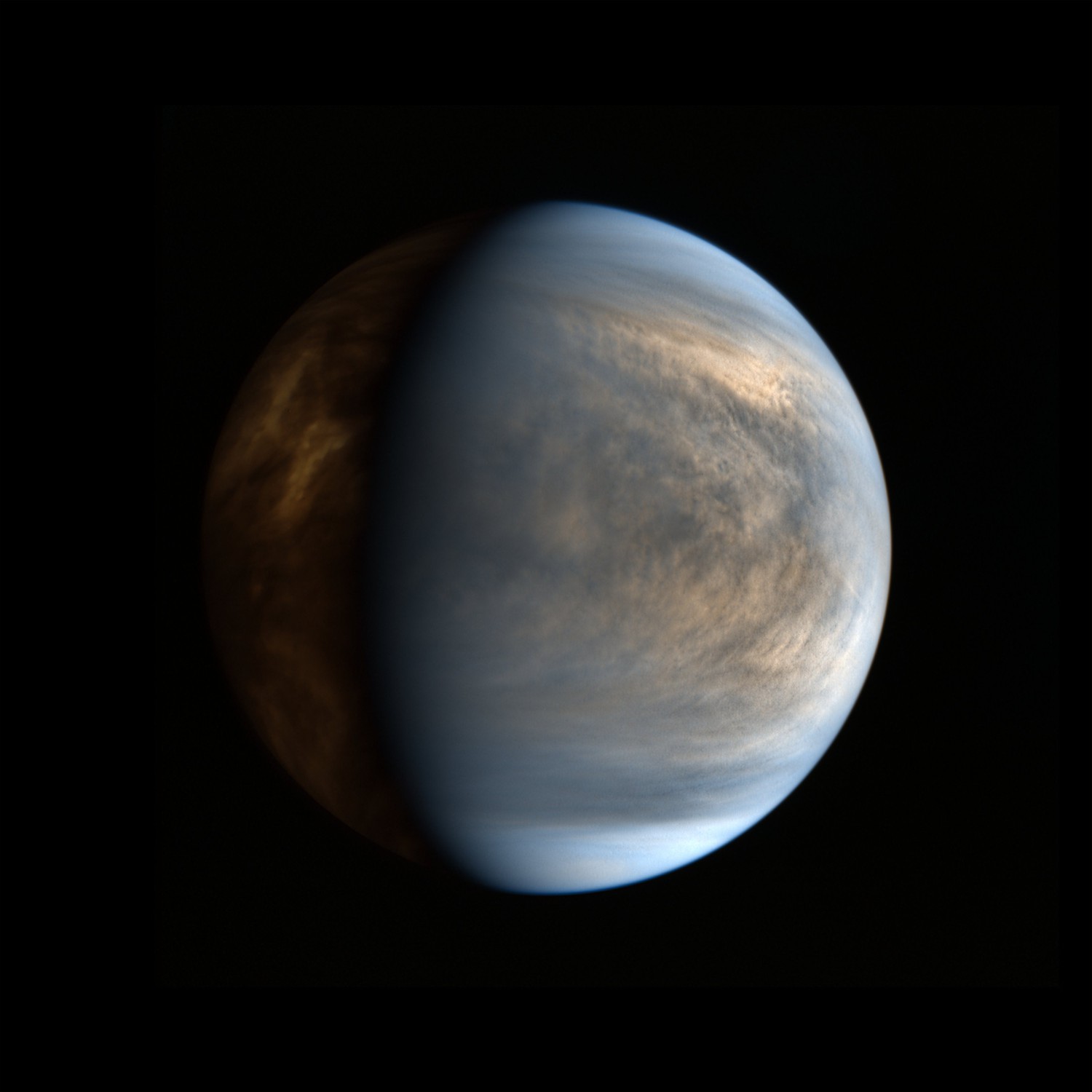
Anatomy of a Habitable Planet. Winner in the 'Annie Maunder for Image Innovation' category of the Astronomy Photographer of the Year competition, 16th edition. Sep, 2024. [Awards Ceremony] [Story behind the image: Earth as you've never seen it before, RMG]
The Heart of the Galaxy. Shortlisted image in the 'Annie Maunder for Image Innovation' category of the Astronomy Photographer of the Year competition, 16th edition. Sep, 2024.
How To Create Astro Images With Public Data. Interview by Anthony Robinson, founder of Skies & Scopes astrophotograpy and astronomy website. November, 2023.
Cassinified Pluto. Shortlisted image in the 'Annie Maunder for Image Innovation' category of the Astronomy Photographer of the Year competition, 15th edition. July, 2023.
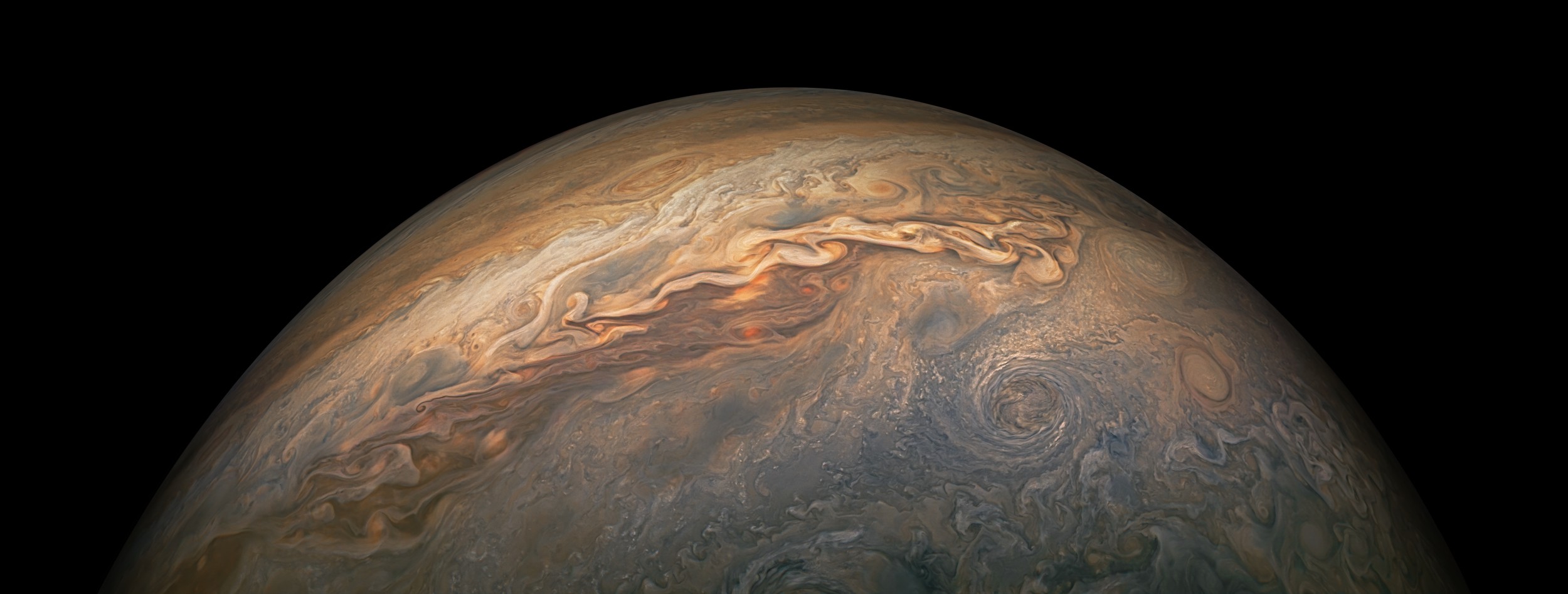
Cloud tops at Jupiter North North Temperate Belt (NASA Juno, Perijove 16). Selected by the US National Academies as the cover image for the printed version of their 2022 report "Foundations of a Healthy and Vital Research Community for NASA Science". National Academies, 2022.
Juegos de luces y sombras en Sagitario. 3rd prize in the category "Night Sky" of the Astrophotography Contest of the Red Andaluza de Astronomía (RAdA), September 2022.
Busy Star. Shortlisted image in the 'Annie Maunder for Image Innovation' category of the Astronomy Photographer of the Year competition, 14th edition. July, 2022.
Astrofotografía: la ciencia transforma datos en arte. Charla en el ciclo "Ciencia en Bulebar". Dec 15th, 2021, Seville (Spain).
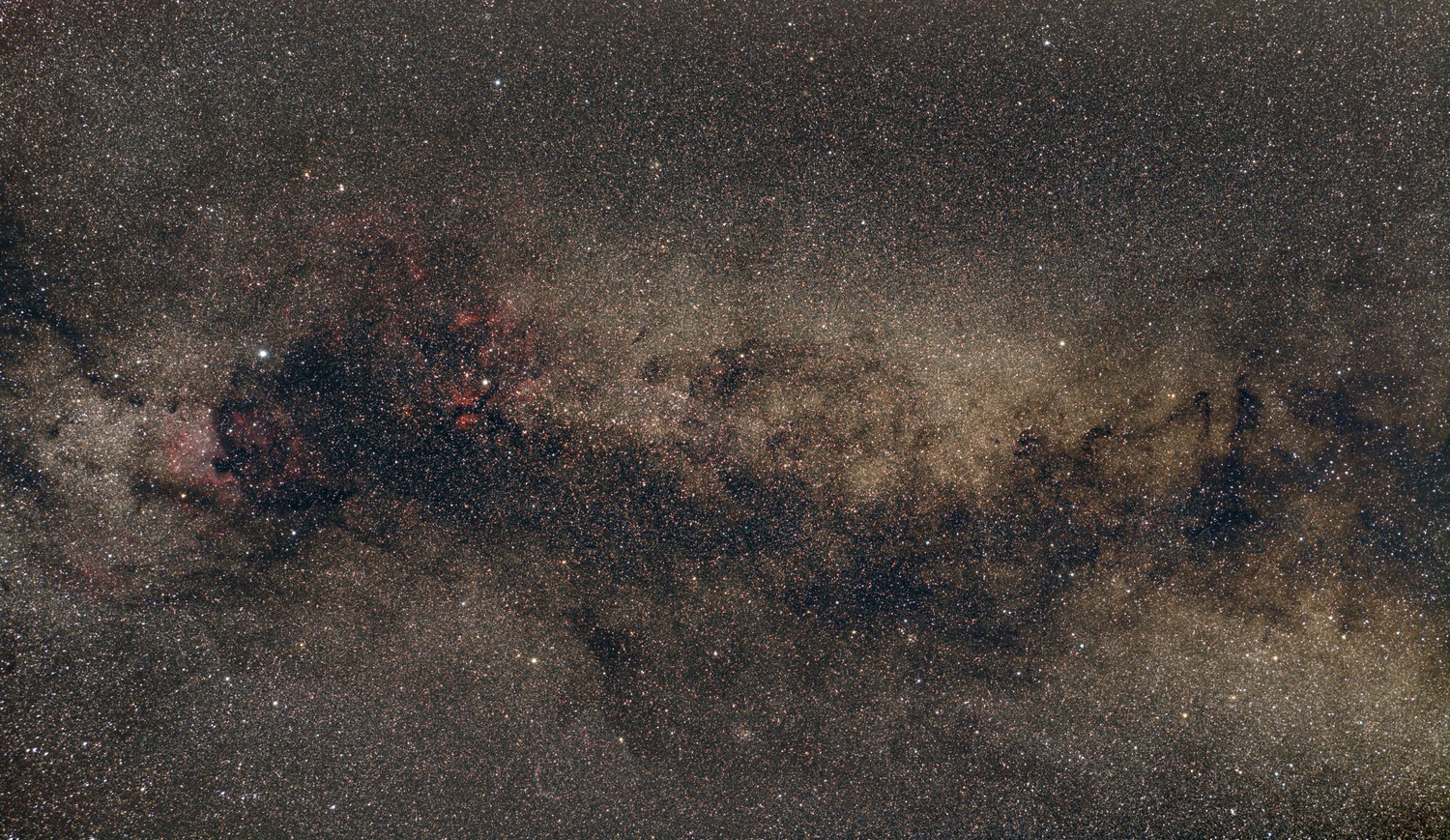
From Antares to Zeta Oph Nebula. Highlighted by the European Space Agency (ESA) spanish Twitter account on Dec 6th, 2021.
Cave Nebula. Highlighted by the European Space Agency (ESA) spanish Twitter account on Oct 8th, 2021.
Oasis de Oscuridad. Commended timelapse project of the VI Concurso de Astrofotografia, Timelapse y Dibujo Astronómico de Calar Alto. Sep 21th, 2021. [YouTube]
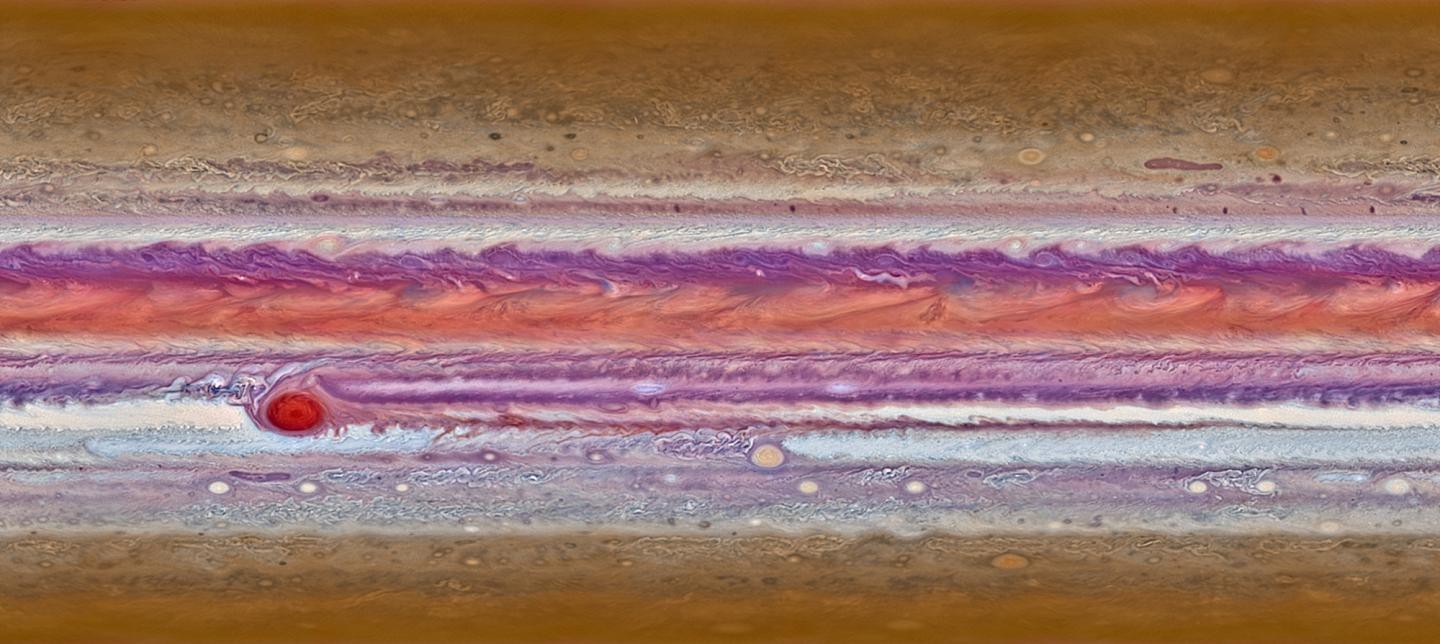
Another Cloudy Day on Jupiter: A Surface Map Based on 8 Filters Data. Winner (joint) image in the 'Annie Maunder Special Prize for Image Innovation' category of the Astronomy Photographer of the Year competition, 13th edition. Sep 16th, 2021. [+ Info] [Awards Ceremony] Published on BBC Sky at Night magazine #197, p. 32, October 2021 and in the online edition.
Icelandic Rivers of Light. 2nd place on 'Aurorae Time-lapse' category of the IAU OAE (International Astronomical Union - Office of Astronomy for Education) 2021 Astrophotography Contest. Aug 25th, 2021. [Full Video]
Multiband Whirlpool Galaxy: From Infrared to X-Rays. Shortlisted image in the 'Annie Maunder for Image Innovation' category of the Astronomy Photographer of the Year competition, 13th edition. June, 2021.[+ Info]
Another Cloudy Day on Jupiter: A Surface Map Based on 8 Filters Data. Shortlisted image in the 'Annie Maunder Special Prize for Image Innovation' category of the Astronomy Photographer of the Year competition, 13th edition. June, 2021.[+ Info]
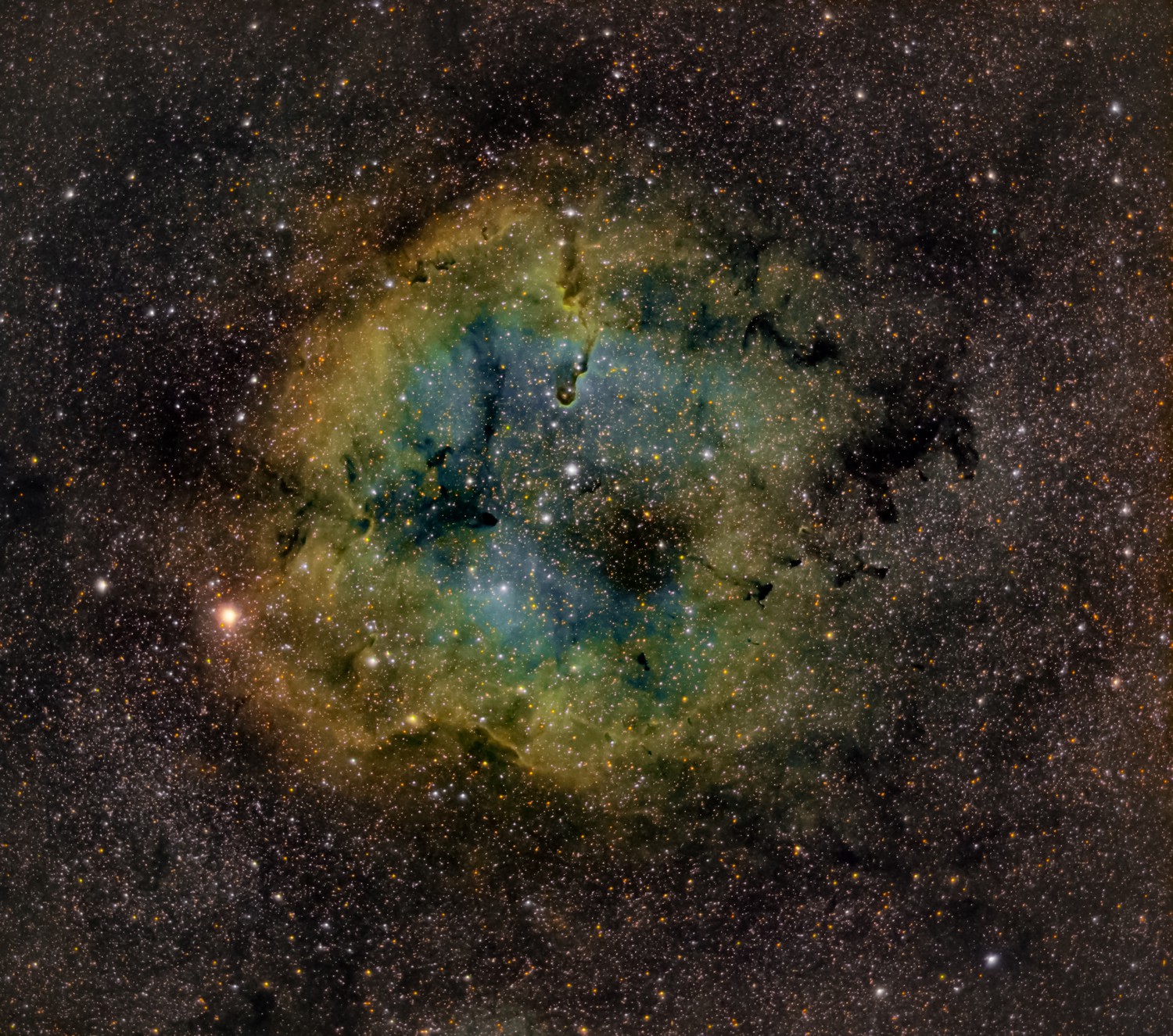
Red Dragon Nebula. Amateur Astronomy Picture of the Day (AAPOD) on Nov 27th, 2020.
Nebulae in Lacerta. Astronomía magazine, issue #257 (November 2020), p. 87.
Pleiades cluster wrapped in interstellar dust. Astronomía magazine, issue #256 (October 2020), p. 87.
Pleiades cluster wrapped in interstellar dust. Amateur Astronomy Picture of the Day (AAPOD) on Sep 19th, 2020.
Nebulae in Lacerta. Highlighted by the European Space Agency (ESA) spanish Twitter account on Sep 17th, 2020.